Fanuc Robotics Simulation Software Download
Oct 24, 2001 - Rochester Hills, Mich. – Fanuc Robotics North America Inc. Introduced its new robot simulation software, SimPRO, and PalletPRO, a palletizing.

In general terms, simulation is a process to develop a virtual model capable of emulating the real-world process. Applied in robotics, the simulation process is used to create a virtual model of a robot including the design and programming code. Most popular robotics simulation software is used in 3D modeling and rendering in a virtual environment that imitate the real environment of the robot. For example, we can simulate a robotic vacuum cleaner in a house. First, we have to build a virtual model of the robot that will be used in a virtual model of a house. This simulation example includes at least two main 3D virtual models: a 3D virtual model for robot and a model for the rooms. Other objects such as a chair, a bed, a sofa, etc.
Should be also simulated since the robot should avoid the collision with these objects. A complete simulation project includes the programming code that will be installed in the physical model of the robot.
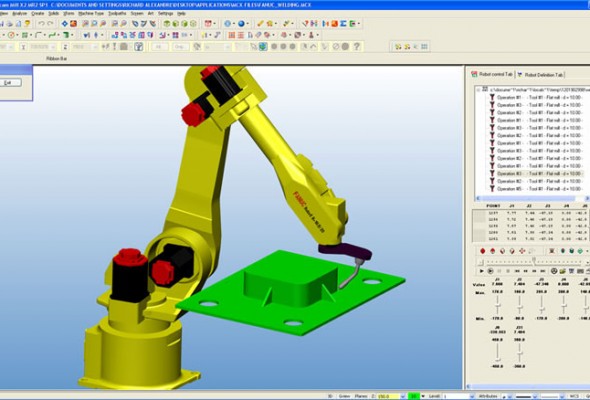
Robotics Simulation Softwares (photo source cyberbotics.com) The first step involved in developing a robot should be the simulation. It allows developers to test the programming code and check the mechanical design according to design proposal request. Since the simulation is not depending on the physical model, the virtual model of the robot could be modified without additional costs. Based on mathematical formulas, the simulator builds virtual objects with a very close behavior than the final product. This is one of the biggest advantages of simulation.
In 90s, two companies have collaborated to design the first commercial robotic simulation software. These two companies were.
The software was used to solve complex design and to program robots. Since then, the simulation in robotics has caught the attention. With advanced and a wide range of features, all the simulation software used today have an extensive simulation capability where any user can manage the design and can associate this with the manufacturing process. Advantages and disadvantages of simulation Any technology has its advantages and disadvantages. Using simulation tools to design robots is a simple and cheap method to build complex robots, at least virtual robots.
In the advantages area I can include a lower cost, while all of the simulation tools offer the possibility to simulate the robot in different scenarios, the programming code can be tested to determine the compatibility with the specifications required, and many more features. Among disadvantages there are the programming problems that cannot cover all the scenarios that may occur in the real world.
*If you have any problem relating to this video, then please do make a comment in description box below. Commview for wifi reassociaciya uzlov ne rabotaet city.
An interesting list – thank you. One thing I find puzzling is how to choose a simulator which will work with hobbyist hardware – specifically an RC Servo controller.
Is it possible to, say, simulate a cheapo robot arm (eg the Dagu) and write a program for it, then transfer that to a computer controlling the actual arm? Or to a computer equipped with a supported servo-controller that can drive the arm? For example, I am driving my Dagu arm with a Phidget 1061 as this came with a C library which the original kit did not. Ideally I want to run under Linux as other software working with the robot does not work under Windows. Folks, realize that robotics simulation as being discussed in the opening segments with Tecnomatix and Deneb are based on programming commercial 6-axis robots. The simulation allows basics of speed, motion, and trajectory in its infancy but has grown.